
最近有使用到事件框架,因此对事件框架的学习简单做一个学习笔记。
因为我使用的是libuv,所以后文中部分跟事件框架特性相关的内容和图片是基于libuv的官方文档而言的,不泛指一切事件框架。
核心构成
event-loop + 基于I/O或者其他事件通知的回调函数。
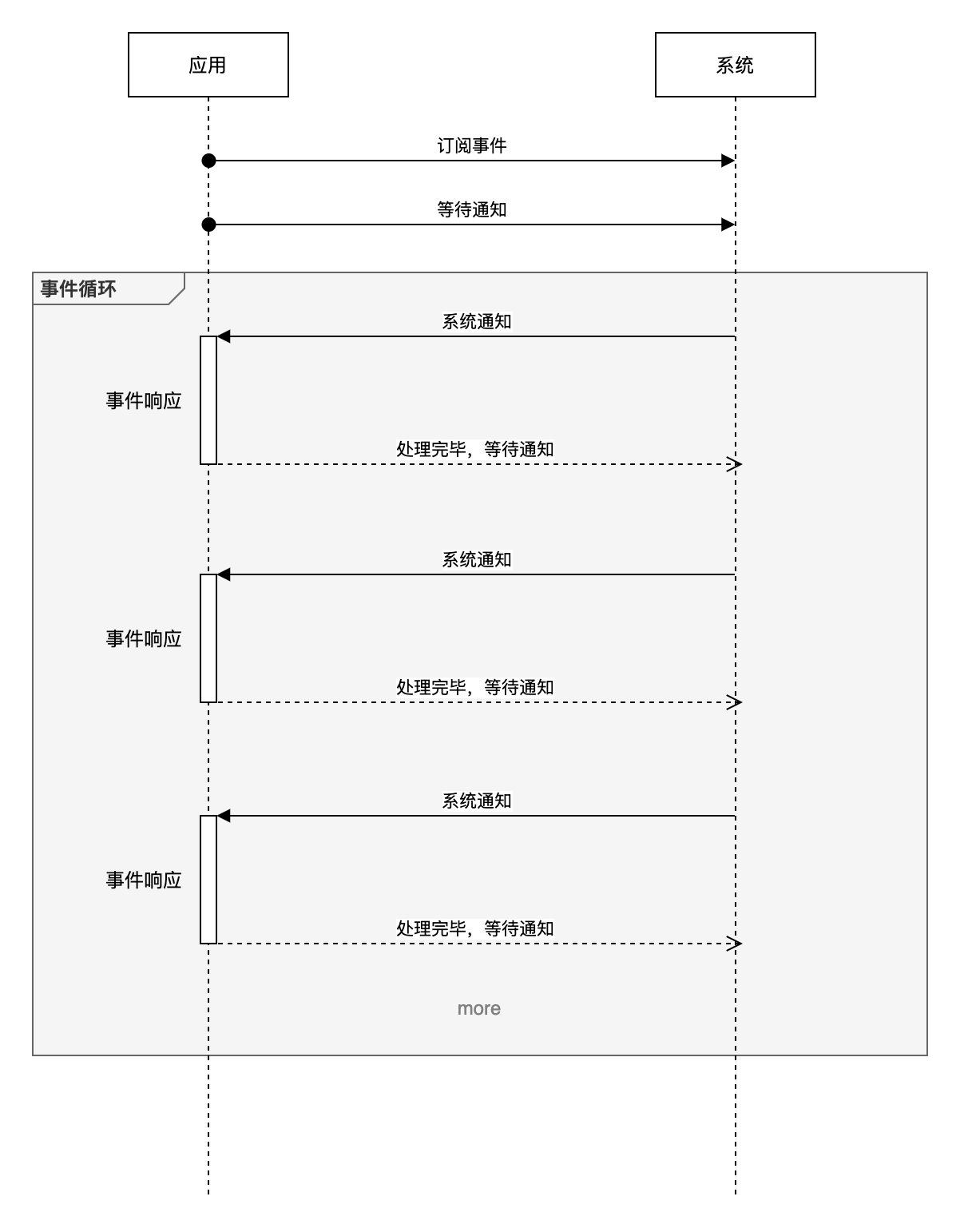
在事件驱动编程中,程序会关注每一个事件,并且对每一个事件的发生做出反应。libuv会负责监听各个来源的事件。用户通过注册回调函数在监听到事件的时候被调用。event-loop会一直保持运行状态。用伪代码描述如下:
1 | while there are still events to process: |
异步实现
需要非阻塞原因
系统编程中出现输入输出的场景多于数据处理。问题在于传统的输入输出函数(例如read,fprintf)都是阻塞式的。在任务完成前函数不会返回,程序在这段时间内什么也做不了。这导致远低于cpu处理速度的IO传输速度是高性能系统的主要障碍。
解决方案一:多线程
每一个阻塞的I/O操作都会被分配到各个线程中。当某个线程一旦阻塞,处理器就可以调度处理其他需要cpu资源的线程(操作系统自行分配cpu资源,采用非阻塞方式来轮流执行任务)。
解决方案二:异步
现代操作系统大多提供了基于事件通知的子系统。为异步的实现提供了基础。
例如正常的socket上的read调用会发生阻塞,直到发送方把信息发送过来。但是,实际上程序可以请求操作系统监视socket事件的到来,并将这个事件通知放到事件队列中。这样,程序就可以很简单地检查事件是否到来,通知正在处理其他任务的cpu处理事件,及时地获取数据。
异步的具体表现是程序可以在时空上地某一端表达对某事件的兴趣,并在时空地另一端被动地获取到数据。非阻塞是因为程序不是主动地请求等待,而是被动地被事件调用,期间可以自由地做其他的事。
异步实现的基础
为了追本溯源,以 epoll 为例分析可实现异步的操作系统基础。
epoll简介
epoll 是由 Linux 内核提供的一个系统调用,我们的应用程序可以通过它:
- 告诉系统帮助我们同时监控多个文件描述符
- 当这其中的一个或者多个文件描述符的 I/O 可操作状态改变时,我们的应用程序会接收到来自系统的事件提示(event notification)
epoll流程示例
使用伪代码写一个epoll的具体实现流程,即如下:
1 | // 创建 epoll 实例 |
epoll的触发模式
触发模式分为水平触发和边缘触发。
名词来源
触发模式是传统电子领域的名词的衍生义,下图为电子领域表示电压变化的时序图。
水平触发:在高低电压的峰谷值周期内部会激活对应的电路。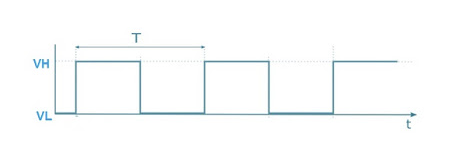
边缘触发:在高低电压变化的瞬间会激活对应的电路。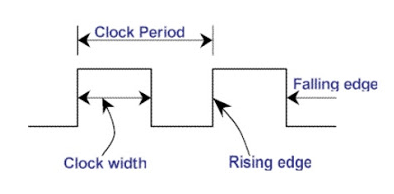
epoll中触发模式实例
比如我们有一个fd表示刚建立的客户端连接,随后客户端给我们发送了 5 bytes 的内容。
如果是水平触发:
- 我们的应用会被系统唤醒,因为 fd 此时状态变为了可读
- 我们从系统的缓冲区中读取 1 byte 的内容,并做了一些业务操作
- 进入到新的一次事件循环,等待系统下一次唤醒
- 系统继续唤醒我们的应用,因为缓冲区还有未读取的 4 bytes 内容
如果是边缘触发:
- 我们的应用会被系统唤醒,因为 fd 此时状态变为了可读
- 我们从系统的缓冲区中读取 1 byte 的内容,并做了一些业务操作
- 进入到新的一次事件循环,等待系统下一次唤醒
- 此时系统并不会唤醒我们的应用,直到下一次客户端发送了一些内容,比如发送了 2 bytes(因为直到下一次客户端发送了请求之前,fd 的状态并没有改变,所以在边缘触发下系统不会唤醒应用)
- 系统唤醒我们的应用,此时缓冲区有 6 bytes = (4 + 2) bytes
对此场景下两种触发模式的理解:
水平触发,因为已经是可读状态,所以它会一直触发,直到我们读完缓冲区,且系统缓冲区没有新的客户端发送的内容;
边缘触发,对应的是状态的变化,每次有新的客户端发送内容,都会设置可读状态,因此只会在这个时机触发。
epoll的局限性
epoll 并不能够作用在所有的 IO 操作上,比如文件的读写操作,就无法享受到 epoll 的便利性。
所以在实现异步操作框架时,一般会混合多种非阻塞手段:
- 将各种操作系统上的类似 epoll 的系统调用(比如 Unix 上的 kqueue 和 Windows 上的 IOCP)抽象出统一的 API(内部 API)
- 对于可以利用系统调用的 IO 操作,优先使用统一后的 API
- 对于不支持或者支持度不够的 IO 操作,使用线程池(Thread pool)的方式模拟出异步 API
- 最后,将上面的细节封装在内部,对外提供统一的 API
框架逻辑结构
基础代码示例
这个是一个异步事件框架的基本骨架,很重要。
主体就是一个while循环,内部依次处理了timer,pending,idle,prepare,io_poll,check,closing的队列事件,这个先后顺序也表示了这些事件的优先级。
1 | int uv_run(uv_loop_t* loop, uv_run_mode mode) { |
抽象的操作概念
event-loop中存在一些操作的抽象概念,通过分析他们的api对他们的抽象进行一个简述。
Handle
Handle表示需要长期存在的操作,Request表示只需要短暂存在的操作,有着不同的使用方式。
handle的API如下:
因为是长期存在的操作,所以基本上会拥有三个步骤:初始化/开始/停止。
1 | // IO 操作 |
Requet
request的API如下:
requst是个短暂操作,交互形式本质是个请求,提交请求则返回结果。
1 | int uv_getaddrinfo |
联系
Handle 和 Request 两者不是互斥的概念,Handle 内部实现可能也用到了 Request。因为一些宏观来看的长期操作,在每个时间切片内是可以看成是 Request 的,比如我们处理一个请求,可以看成是一个 Handle,而在当次的请求中,我们很可能会做一些读取和写入的操作,这些操作就可以看成是 Request。
不同的回调队列
timer
timer存在以下三个API:
1 | int uv_timer_init(uv_loop_t* loop, uv_timer_t* handle); |
init
init没有什么特殊的地方,只是出初始了一下handle并将handle添加到了队列里。
start
start内部做了如下的一些工作:
1 | int uv_timer_start(uv_timer_t* handle, |
stop
stop内部做了如下的一些工作:
1 | int uv_timer_stop(uv_timer_t* handle) { |
timers串联分析
start 和 stop 其实可以粗略地概括为,往属性 loop->timer_heap 中插入或者移出 handle,并且这个timer_heap 使用 binary min heap 的数据结构。
整个timers的启动:
1 | void uv__run_timers(uv_loop_t* loop) { |
pending
pending数据结构
使用了一个queue来维护handle。在libuv中,queue是一个环形结构,首尾指针都是本身。具体可以看libuv中的queue.h的头文件,不详细展开了。
pending串联分析
1 | static int uv__run_pending(uv_loop_t* loop) { |
idle,check,prepare
这部分感觉不重要,思想上和pending大同小异,不重点看了。
io poll
在libuv中,虽然把相关名字取成了poll,但是实际调用的确实是epoll。
1 | void uv__io_poll(uv_loop_t* loop, int timeout) { |
timeout参数
在epoll_wait中timeout参数的含义:
- 如果是 -1 表示一直等到有事件产生
- 如果是 0 则立即返回,包含调用时产生的事件
- 如果是其余整数,则以 milliseconds 为单位,规约到未来某个系统时间片内
在epoll_wait中timeout参数的获得:
核心思想就是要尽可能的让 CPU 时间能够在事件循环的多次迭代的、多个不同任务队列的执行、中尽可能的分配均匀,避免某个类型的任务产生很高的延迟。
在uv__next_timeout 实现主要分为三部分:
- 只有在没有 timer 待处理的时候,才会是 -1,-1 会让后续的 uv__io_poll 进入 block 状态、完全等待事件的到达
- 当有 timer,且有超时的 timer handle,则返回 0,这样 uv__io_poll 不会 block 住事件循环,目的是为了快速进入下一次事件循环、以执行超时的 timer
- 当有 timer,不过都没有超时,则计算最小超时时间 diff 来作为 uv__io_poll 的阻塞时间
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50int uv_backend_timeout(const uv_loop_t* loop) {
// 时间循环被外部停止了,所以让 `uv__io_poll` 理解返回以便尽快结束事件循环
if (loop->stop_flag != 0)
return 0;
// 没有待处理的 handle 和 request,则也不需要等待了,同样让 `uv__io_poll`尽快返回
if (!uv__has_active_handles(loop) && !uv__has_active_reqs(loop))
return 0;
// idle 队列不为空,也要求 `uv__io_poll` 尽快返回,这样尽快进入下一个时间循环
// 否则会导致 idle 产生过高的延迟
if (!QUEUE_EMPTY(&loop->idle_handles))
return 0;
// 和上一步目的一样,不过这里是换成了 pending 队列
if (!QUEUE_EMPTY(&loop->pending_queue))
return 0;
// 和上一步目的一样,不过这里换成,待关闭的 handles,都是为了避免目标队列产生过高的延迟
if (loop->closing_handles)
return 0;
return uv__next_timeout(loop);
}
int uv__next_timeout(const uv_loop_t* loop) {
const struct heap_node* heap_node;
const uv_timer_t* handle;
uint64_t diff;
heap_node = heap_min(timer_heap(loop));
// 如果没有 timer 待处理,则可以放心的 block 住,等待事件到达
if (heap_node == NULL)
return -1; /* block indefinitely */
handle = container_of(heap_node, uv_timer_t, heap_node);
// 有 timer,且 timer 已经到了要被执行的时间内,则需让 `uv__io_poll`
// 尽快返回,以在下一个事件循环迭代内处理超时的 timer
if (handle->timeout <= loop->time)
return 0;
// 没有 timer 超时,用最小超时间减去、当前的循环时间的差值,作为超时时间
// 因为在为了这个差值时间内是没有 timer 超时的,所以可以放心 block 以等待
// epoll 事件
diff = handle->timeout - loop->time;
if (diff > INT_MAX)
diff = INT_MAX;
return (int) diff;
}
thread pool
在前面提到过, epoll 目前并不能处理所有的 IO 操作,对于那些 epoll 不支持的 IO 操作,需要内部的线程池来模拟出异步 IO。
init
通过 uv_fs_read 的内部实现,找到 uv__work_submit 方法,发现其中初始化的线程池。
1 | void uv__work_submit(uv_loop_t* loop, |
init_once 内部会调用 init_threads 来完成线程池初始化工作。
1 | static uv_thread_t default_threads[4]; |
post
还是uv__work_submit 方法,内部通过post函数完成任务的提交。
提交任务其实就是将任务插入到线程共享队列 wq,并且有空闲线程时才会通知它们工作。如果当前没有空闲进程,那么工作线程会在完成当前工作后,主动检查 wq 队列是否还有待完成的工作,有的话会继续完成,没有的话,则进入睡眠,等待下次被唤醒。
1 | static void post(QUEUE* q, enum uv__work_kind kind) { |
更多逻辑
线程池调度这块的实现有些复杂,这边先跳过,之后有机会再补。
closing
通过closing队列来实现对长操作handle的关闭操作。
调用 uv_close 关闭handle后,libuv 会先释放其占用的资源(比如关闭 fd),随后通过调用 uv__make_close_pending 把 handle 连接到 closing_handles 队列中,该队列会在事件循环中被 uv__run_closing_handles(loop) 调用所执行。
1 | void uv_close(uv_handle_t* handle, uv_close_cb close_cb) { |